
लियू सिक्सिन के लघु विज्ञान कथा उपन्यास "वन्स अपॉन ए टाइम इन द क्रेटेशियस पीरियड" में, डायनासोर विशाल हैं और अच्छा काम नहीं कर सकते हैं, लेकिन चींटियां कर सकती हैं, इसलिए दोनों अपनी खुद की ताकत लेते हैं और अपनी सभ्यता विकसित करने के लिए मिलकर काम करते हैं। चींटी के छोटे आकार और विशेषताओं को खोजने में मुश्किल ने भी कहानी के विकास को बढ़ावा देने में महत्वपूर्ण भूमिका निभाई।

चित्र से: अनप्लैश
डायनासोर के लिए अपने शरीर पर चींटियों को ढूंढना मुश्किल हो सकता है, लेकिन अगर वे लोगों पर चढ़ते हैं, तो वे अभी भी मिल सकते हैं। जर्नी टू द वेस्ट के एनिमेटेड संस्करण में एक क्लासिक दृश्य है। टैंग सेंग ने एक चींटी को छोड़ा जो उसके ऊपर चढ़ गई तन। हालांकि, अगर यह माइक्रो-रोबोट शरीर पर दिखाई देता है, तो यह नहीं मिल सकता है, आखिरकार, इसकी चौड़ाई केवल आधा मिलीमीटर है।

तस्वीर से: नॉर्थवेस्टर्न यूनिवर्सिटी
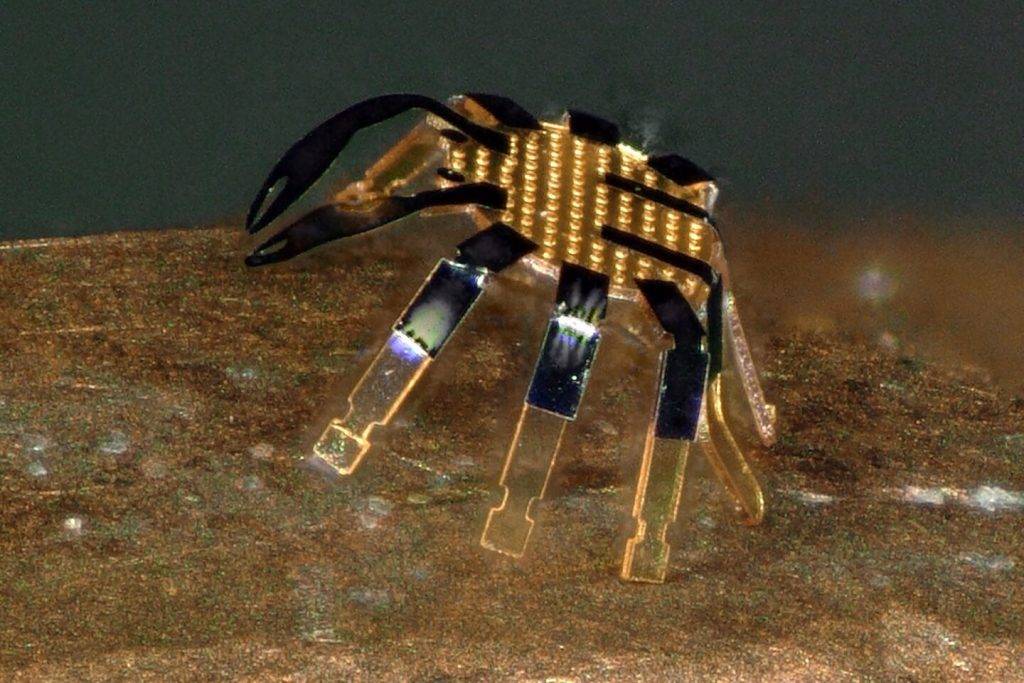
नॉर्थवेस्टर्न यूनिवर्सिटी द्वारा विकसित केकड़े के आकार का माइक्रो-रोबोट हार्ड-टू-फाइंड पिस्सू से भी छोटा है, और इसका सबमिलीमीटर आकार छोटा और हल्का है, जिससे इसे स्पॉट करना कठिन हो जाता है। हालांकि, गति की गति बहुत तेज नहीं है, और यह अपने शरीर की लंबाई के लगभग आधे प्रति सेकंड की गति से आगे बढ़ सकती है।
तस्वीर से: नॉर्थवेस्टर्न यूनिवर्सिटी
इस तरह के माइक्रो-रोबोट का विचार और अवधारणा वास्तव में कई विज्ञान कथाओं या फिल्मों में दिखाई दी है (जैसे कि वह आदमी जो हमेशा पोस्टर में सुपरहीरो पर खड़ा होता है – एंट-मैन), और इसे शोधकर्ताओं द्वारा अन्वेषण उद्देश्य के लिए भी बनाया गया है। या इसी तरह की वस्तुओं को दवाओं को विशिष्ट शारीरिक संरचनाओं तक पहुंचाने के लिए, लेकिन ये ज्यादातर शरीर में बहाव जैसी गति पर निर्भर करती हैं।

चित्र से: जीक्यू
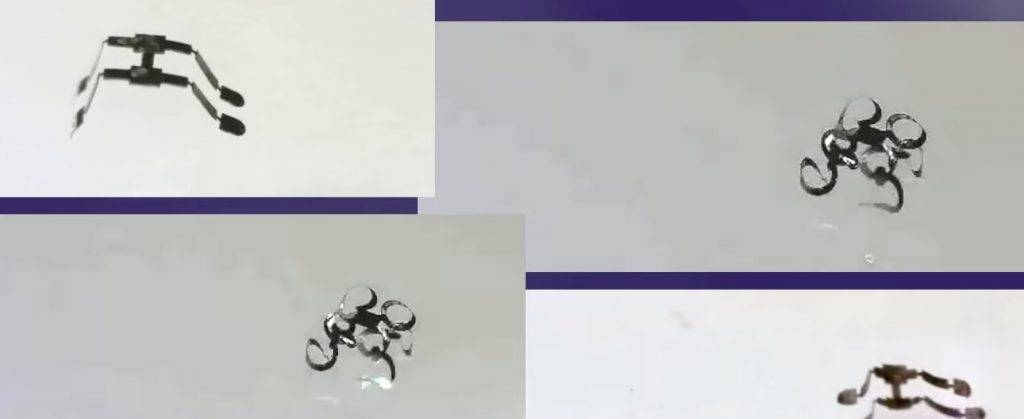
इन रोबोटों के विपरीत, नॉर्थवेस्टर्न यूनिवर्सिटी द्वारा विकसित "सब-मिलीमीटर-स्केल केकड़ा" झुक सकता है, मुड़ सकता है, क्रॉल कर सकता है, चल सकता है, मुड़ सकता है और यहां तक कि कूद भी सकता है। इससे भी महत्वपूर्ण बात यह है कि इन क्रियाओं को तारों के बिना किया जा सकता है या यह रिमोट हेरफेर द्वारा किया जाता है एक शारीरिक संबंध।
तस्वीर से: नॉर्थवेस्टर्न यूनिवर्सिटी
जटिल हार्डवेयर, हाइड्रोलिक या इलेक्ट्रिक ड्राइव के बिना चलने की क्षमता उस सामग्री के कारण होती है जो सबमिलीमीटर-स्केल रोबोट – आकार की मेमोरी मिश्र धातु से बनी होती है। इसकी ताकत शरीर की लोच से आती है। चूंकि यह सामग्री गर्म होने पर "स्मृति" के तहत आकार में बदल जाती है, इसलिए इसकी गति को तब तक नियंत्रित किया जा सकता है जब तक इसे गर्म किया जाता है।
तस्वीर से: नॉर्थवेस्टर्न यूनिवर्सिटी
रोबोट की गति और हेरफेर मोड को ग्लोबल हीटिंग, या लेजर-प्रेरित स्थानीय थर्मल एक्ट्यूएशन का उपयोग करके रैखिक/वक्र क्रॉलिंग, चलने, मोड़ने और कूदने के लिए झुका, मुड़ और विस्तारित किया जा सकता है। लेजर न केवल रोबोट की शुरुआत को दूर से नियंत्रित कर सकता है, बल्कि लेजर स्कैनिंग की दिशा भी रोबोट के चलने की दिशा निर्धारित करती है।
तस्वीर से: नॉर्थवेस्टर्न यूनिवर्सिटी
चूंकि शरीर विशेष है, इस प्रकार के छोटे और "आज्ञाकारी" रोबोट का स्वाभाविक रूप से अपना विशेष उपयोग होता है। हालांकि अध्ययन अभी भी खोज के चरण में है, शोधकर्ताओं का मानना है कि इस तकनीक के साथ, यह एक माइक्रो-रोबोट बन सकता है जो सीमित स्थानों में व्यावहारिक कार्य करने में सक्षम है।

तस्वीर से: नॉर्थवेस्टर्न यूनिवर्सिटी
उदाहरण के लिए, ये "छोटे केकड़े" छोटे और मध्यम आकार की औद्योगिक संरचनाओं या मशीनों की मरम्मत या संयोजन कर सकते हैं; अवरुद्ध धमनियों को खोलने, रक्तस्राव को रोकने, या कैंसर के ट्यूमर को हटाने के लिए न्यूनतम इनवेसिव सर्जरी के लिए इन्हें "सर्जिकल सहायक" के रूप में भी इस्तेमाल किया जा सकता है। इस अध्ययन में भाग लेने वाले प्रोफेसर जॉन ए रोजर्स ने यह भी कहा कि इन असेंबली तकनीकों और भौतिक अवधारणाओं के साथ, चलने वाले रोबोट कई आकारों या त्रि-आयामी आकारों में बनाए जा सकते हैं।
दिलचस्प बात यह है कि कुछ लोगों को इस माइक्रो-रोबोट के बारे में कुछ "अजीब" संदेह हैं: क्या होगा यदि यह कान में रेंगता है?

#Aifaner के आधिकारिक WeChat खाते पर ध्यान देने के लिए आपका स्वागत है: Aifaner (WeChat: ifanr), अधिक रोमांचक सामग्री जल्द से जल्द आपके लिए लाई जाएगी।
लव फैनर | मूल लिंक · टिप्पणियां देखें · सिना वीबो